%Ejemplo entrenamiento OR con redes neuronales
x = [0 0 1 1; 0 1 0 1]; % vector de entrada entrenamiento
t = [0 1 1 1]; % vector salida entrenamiento
net = newp(minmax(x),1,'logsig')%Crea red neuronal perceptron
net = train(net,x,t); %entrena la red neuronal
pesos=net.iw{1,1}
bias=net.b{1}
output=sim(net,[0;0]) %simula el resultado de la red neuronal
domingo, 13 de octubre de 2013
miércoles, 2 de octubre de 2013
Parcial práctico 2do Corte
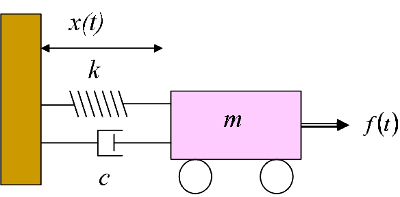
El objetivo de la programación del sistema difuso controlado, es ubicar en una posición cualquiera variable entre 1 y 5, la masa sujetada por un resorte y un amortiguador. Obtenga la mejor solución utilizando conjuntos difusos en el cual se busca que la masa no tenga mucha oscilación para llegar a su posición final y se disminuya al máximo posible el error de posición.
Los datos de la masa (m), coeficiente de elasticidad (k) y coeficiente de fricción (b) se deben colocar de acuerdo a los últimos 3 números del código. Ej. 1800111 m=1; k=1; b=1;
Se tiene hasta las 10:30 a.m. para la entrega de la solución del ejercicio propuesto, luego el docente pasará por cada uno revisando el correcto funcionamiento del mismo. En el caso que se termine antes el ejercicio por favor avisar para proceder con la corrección del mismo.
 El link de descarga del ejercicio es: https://www.dropbox.com/sh/anh6mizttucyx07/830yhJYEon
El link de descarga del ejercicio es: https://www.dropbox.com/sh/anh6mizttucyx07/830yhJYEon
Los datos de la masa (m), coeficiente de elasticidad (k) y coeficiente de fricción (b) se deben colocar de acuerdo a los últimos 3 números del código. Ej. 1800111 m=1; k=1; b=1;
Se tiene hasta las 10:30 a.m. para la entrega de la solución del ejercicio propuesto, luego el docente pasará por cada uno revisando el correcto funcionamiento del mismo. En el caso que se termine antes el ejercicio por favor avisar para proceder con la corrección del mismo.
Suscribirse a:
Comentarios (Atom)